Valor Variable
Este bloque se utiliza para acceder al valor de una variable. El bloque es remplazado por el último valor asignado a esa variable.
Se utiliza para remplazar números literales en todos los bloques que los requieran.
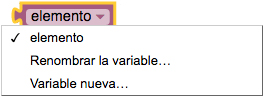
El bloque posee un menú que permite 3 acciones:
Seleccionar la variable a utilizar.
Renombrar: cambiarle el nombre a la variable.
Crear una nueva variable.
Ejemplo
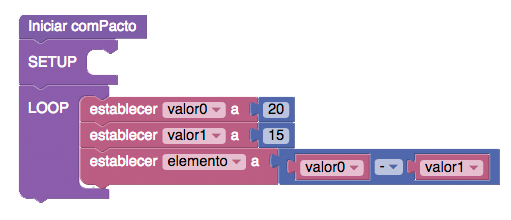
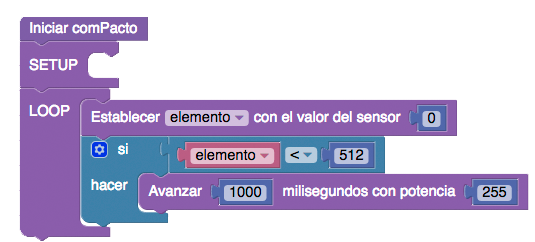
Código
// resta entre variables < - - - - - - - - - - -
elemento = valor0 - valor1;
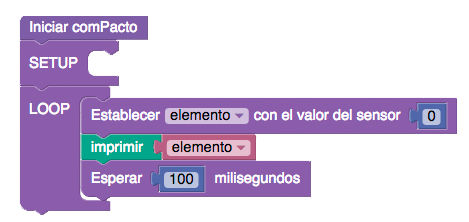
// Impresión Serial de una variable < - - - - - - - - - - -
Serial.print(elemento);
// Análisis del valor de una variable < - - - - - - - - - - -
if (elemento < 512) {
}
Si se crea una nueva variable, aparecerá un menú, donde se debe introducir un nombre.
Los nombres pueden estar compuestos por: letras, números y guión bajo. Pero deben empezar con una letra y distingue entre mayúsculas y minúsculas.
Los nombres no pueden repetirse, ni pueden utilizar las propias de variables de ComPacto, ni las palabras reservadas del lenguaje Arduino.
pinData pinClock pinLatch pinOE datoMultiplexor pin_vel1 orden_dir1A orden_dir1B
pin_vel2 orden_dir2A orden_dir2B pin_led0 orden_led0 pin_led1 orden_led1 pin_ultrasonico_echo
pin_ultrasonico_trigger dist_max pin_sensor0 pin_sensor1 pin_sensor2 pin_sensor3
pin_sensor4 pin_sensor5 repetir
HIGH LOW INPUT OUTPUT SERIAL DISPLAY PI HALF_PI TWO_PI LSBFIRST
MSBFIRST CHANGE FALLING RISING false true null DDRB PINB PORTB
PB0 PB1 PB2 PB3 PB4 PB5 PB6 PB7 DDRC PINC PORTC
PC0 PC1 PC2 private protected public return short signed static switch
throw try unsigned void abs acos asin atan atan2 boolean byte case
ceil char char class constrain cos default delay loop max millis min
new null PI return Serial Setup sin sq sqrt switch tan this true
TWO_PI void while Serial begin read print write peek flush println
available digitalWrite digitalRead pinMode analogRead analogWrite attachInterrupts
detachInterrupts tone noTone pulseIn shiftOut map pow max min constrain
sqrt lowByte highByte bitRead bitWrite bitSet bitClear bit randomSeed random
PC3 PC4 PC5 PC6 PC7 DDRD PIND PORTD PD0 PD1 PD2 PD3 PD4
PD5 PD6 PD7 boolean byte char class default do double int long
delayMicroseconds micros else exp false float floor for HALF_PI if int log